掌握如何減少噪聲,使用中斷服務(wù)例程,以及更多關(guān)于PID控制傳遞函數(shù)的信息。
雖然在 s 域中處理控制系統(tǒng)是完全合乎邏輯的,因?yàn)槭芸叵到y(tǒng)是連續(xù)(時(shí)間)運(yùn)行的,但控制系統(tǒng)的實(shí)現(xiàn)是另一回事?,F(xiàn)在,幾乎所有的控制系統(tǒng)都是基于微處理器(微控制器)或數(shù)字信號(hào)處理器的數(shù)字系統(tǒng),如圖 1所示。
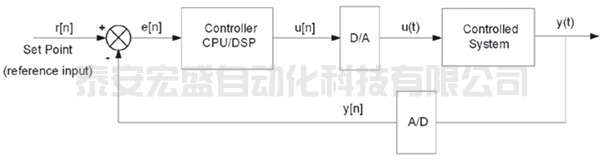
圖 1 :此框圖顯示了一個(gè)數(shù)字閉環(huán)控制系統(tǒng)。
用于離散時(shí)間控制系統(tǒng)的 PID
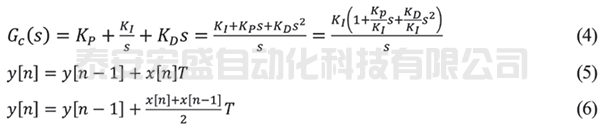
模擬 PID 控制器,仍然被認(rèn)為是非常強(qiáng)大的(圖 2),可以修改為離散時(shí)間控制系統(tǒng),因?yàn)閷⑵湮⒎址匠蹋ǖ仁?1)重寫為其差分形式(等式 2)并不困難。

其中 u[n] 是當(dāng)前時(shí)間 n 的驅(qū)動(dòng)值,e[n] 是時(shí)間 n 的調(diào)節(jié)誤差, e [n-1] 是前一采樣時(shí)間 n-1 的調(diào)節(jié)誤差。T 是采樣的時(shí)間段。相同的時(shí)間段 T 用于信號(hào)處理,即用于 u[n] 的計(jì)算。
對(duì)于實(shí)際應(yīng)用,等式 2 需要從積分部分開(kāi)始進(jìn)行某些修改。積分部分將調(diào)節(jié)誤差的每個(gè)值相加,然后將該和乘以時(shí)間常數(shù)和積分常數(shù)。如果時(shí)間或積分常數(shù)的值突然變化(這可能發(fā)生,尤其是在整定過(guò)程中),則驅(qū)動(dòng)值將突然變化并導(dǎo)致問(wèn)題。更好的方法是先將調(diào)節(jié)誤差乘以這兩個(gè)常數(shù),然后再累加其乘積。通過(guò)使用梯形近似積分代替矩形近似積分,可以從另外一方面實(shí)現(xiàn)改進(jìn)。
如何減少噪聲?
等式 2 的導(dǎo)數(shù)是問(wèn)題的第二個(gè)來(lái)源。在其簡(jiǎn)單形式中,該成員往往是噪聲。為了減少噪聲,可以使用兩個(gè)以上(例如四個(gè))連續(xù)的調(diào)節(jié)誤差采樣。結(jié)果就好像調(diào)節(jié)誤差的差值通過(guò)了一個(gè)微小的(4 階)有限脈沖響應(yīng)(FIR)濾波器。修改后的 PID 公式如下等式 3 所示。該差分方程可以在任何編程語(yǔ)言和任何微處理器 / 微控制器中實(shí)現(xiàn)。

中斷服務(wù)程序
盡管如此,關(guān)于采樣 / 處理周期 T 還有一個(gè)懸而未決的問(wèn)題??刂七^(guò)程周期(頻率)是多少,它取決于什么?控制頻率僅取決于閉環(huán)傳遞函數(shù)的時(shí)間常數(shù)。請(qǐng)記住,這個(gè)時(shí)間常數(shù)可以比受控系統(tǒng)本身的時(shí)間常數(shù)小一個(gè)數(shù)量級(jí)。最佳情況下,運(yùn)行控制程序的頻率應(yīng)比閉環(huán)時(shí)間常數(shù) τ 的值高 5 到 10 倍。在控制過(guò)程開(kāi)始運(yùn)行之前,應(yīng)具有 r[n] 和y[n] 的最新樣本。
最好的安排是,如果控制程序被稱為中斷服務(wù)例程(ISR),則由提供 y[n] 值的 A/D轉(zhuǎn)換器觸發(fā)??刂瞥绦蛴?jì)算的結(jié)果,即執(zhí)行變量 u[n],應(yīng)盡快發(fā)送到 D/A 轉(zhuǎn)換器。否則,受控系統(tǒng)的傳遞函數(shù)將受到傳輸延遲的影響,這可能會(huì)破壞控制系統(tǒng)(使其不穩(wěn)定)。
為了避免噪聲,必須徹底過(guò)濾所有測(cè)量變量,如 y(t)信號(hào),因?yàn)樵肼暱偸强梢詮耐獠繚B透到控制系統(tǒng)中,例如,由電子部件(主要是開(kāi)關(guān)電源)引起的板載噪聲。它們應(yīng)通過(guò)適當(dāng)?shù)目够殳B濾波器,并且截止頻率遠(yuǎn)低于采樣頻率 1/T 的一半。如果由于某種原因,它們無(wú)法通過(guò)適當(dāng)?shù)哪M濾波器進(jìn)行過(guò)濾,則至少應(yīng)過(guò)采樣并進(jìn)行數(shù)字濾波。

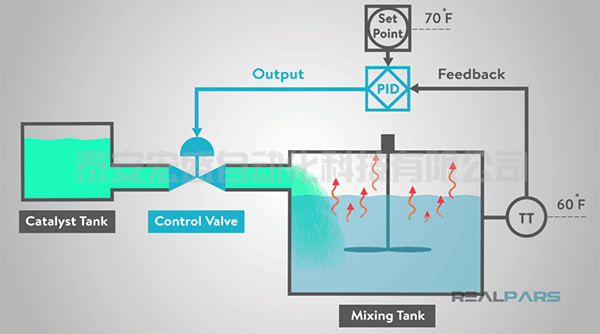
圖 2: PID 控制器根據(jù)比例、積分和微分分量計(jì)算驅(qū)動(dòng)值
關(guān)于 PID 控制傳遞函數(shù)的更多信息
等式 3 不是實(shí)現(xiàn)離散 PID 控制器的唯一方法。另一種可能性是將 PID 控制傳遞函數(shù)從其 s 域(等式 4)轉(zhuǎn)換為 z 域。實(shí)際上,這種轉(zhuǎn)變有兩種方式。兩者都是從離散時(shí)間積分的不同近似推導(dǎo)而來(lái)的。最常見(jiàn)的近似離散時(shí)間積分是矩形(等式 5)和梯形(等式 6)近似。
如果在 z 域中表達(dá) ,對(duì)于矩形近似,您將得到

這是梯形近似的結(jié)果 :

等式 7 和 8 對(duì)應(yīng)于積分項(xiàng),其在 s 域中表示為 1/s。因此,如果取等式 7 右側(cè)的倒數(shù)(s),并用其替換等式 4中的每個(gè) s 算子,則會(huì)得到 PID 補(bǔ)償?shù)囊韵聜鬟f函數(shù)(在z 域中):

類似地,如果取等式 8 右側(cè)的倒數(shù),并用其替換等式 4 中的每個(gè) s 算子,則會(huì)得到以下 PID 補(bǔ)償?shù)膫鬟f函數(shù)(在 z 域中):
z 域中的控制系統(tǒng)建模
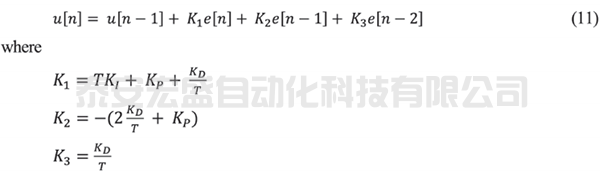
等式 9 和等式 10 適用于在 z 域中對(duì)控制系統(tǒng)建模(例如在 Matlab 中),但不能由任何控制器直接實(shí)現(xiàn)。然而,在對(duì)等式 9 進(jìn)行 z 逆變換后,您將得到以下等式
和等式 10 的 z 逆變換 :
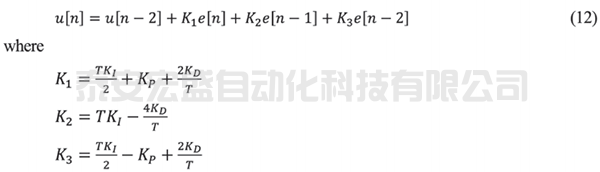
等式 11 和等式 12 非常適合在任何微處理器(微控制器)或數(shù)字信號(hào)處理器上實(shí)現(xiàn)。如果將 K1、K2 和 K3作為預(yù)先計(jì)算好的常數(shù)(而不是變量),整個(gè)控制過(guò)程將需要三次乘法、四次加法并需要記住四個(gè)先前計(jì)算的變量——兩個(gè)調(diào)節(jié)誤差 e[n-1] 和 e[n-2],以及兩個(gè)驅(qū)動(dòng)變量 u[n-1] 和 u[n-2](僅適用于等式 12)。e[n] 計(jì)算需要一次減法。
無(wú)限脈沖響應(yīng)濾波器
您可以進(jìn)一步優(yōu)化控制程序。數(shù)字信號(hào)處理行業(yè)有非常流行的遞歸濾波器,即所謂的無(wú)限脈沖響應(yīng)(IIR)濾波器。通常,它們是級(jí)聯(lián)二階濾波器。圖 3 顯示了一個(gè)這樣的二階濾波器,通常稱為“雙二階”,轉(zhuǎn)換為其標(biāo)準(zhǔn)形式,即級(jí)聯(lián)形式 II。

圖 3 :二階規(guī)范 IIR 濾波器部分用作 PID 控制器。
實(shí)現(xiàn)這種雙二階需要更少的內(nèi)存空間,只需要記住兩個(gè)狀態(tài)變量 d[n-1]、d[n-2],而不是四個(gè)變量。標(biāo)準(zhǔn)無(wú)限脈沖響應(yīng)濾波器段由以下兩個(gè)差分方程描述 :

盡管選擇有限,但 A1 和 A2 的值仍然有選擇的余地。然而,必須遵守兩條規(guī)則 :A1 和 A2 值的總和必須始終為1.0,并且任何值都不能大于 1.0。因此,可以使用的 A1和 A2 系數(shù)如,值 1.0 和 0,或 0.5 和 0.5,或 0 和 1.0,或介于兩者之間的任何值。
最后一種組合,其響應(yīng)與等式 12 的相同。A2 值越低,控制系統(tǒng)響應(yīng)越快。這可以簡(jiǎn)化整定過(guò)程,因?yàn)槟梢詫?KI 常數(shù)(以及 KP 和 K D 值)設(shè)置為某個(gè)合理的值,而不是頻繁修改 KI 值(如果您想使 KP 和 K D 值達(dá)到最優(yōu)則需要重新計(jì)算,即取消受控系統(tǒng)的極點(diǎn)),例如,將 KI 調(diào)整為值 10/(τ1+τ2)(其中 τ1 和 τ2 是受控系統(tǒng)的主要時(shí)間常數(shù)),并通過(guò)調(diào)整 A1 和 A2 值完成最終的整定。
并非每個(gè) PID 實(shí)現(xiàn)都令人滿意
雖然在必須實(shí)現(xiàn)任何算法問(wèn)題時(shí)有一個(gè)選擇總是很好的,但并非每個(gè)實(shí)現(xiàn)都能提供令人滿意的結(jié)果。這同樣適用于本文所描述的 PID 控制過(guò)程。理論上,所有這些過(guò)程在紙面上都很好地工作,但是當(dāng)實(shí)施時(shí),就會(huì)出現(xiàn)問(wèn)題。
雖然第一個(gè)公式,等式 3 的實(shí)現(xiàn)需要比其余兩個(gè)更多的數(shù)學(xué)運(yùn)算(乘法、加法)和記住更多先前的結(jié)果,但它提供了非常平滑的結(jié)果。等式 11 的行為也類似。然而,等式 12 的實(shí)現(xiàn)將無(wú)法產(chǎn)生令人滿意的結(jié)果,因?yàn)樗诜€(wěn)定邊緣上運(yùn)行,其輸出將永久振蕩。等式13/14 將正常工作,但 A1 系數(shù)必須保持 >0,否則的話,其行為將與等式 12 實(shí)現(xiàn)完全相同,并產(chǎn)生永久振蕩。(作者:Peter Galan)
關(guān)鍵概念:
■ 檢查在離散時(shí)間控制系統(tǒng)中使用 PID的選項(xiàng)。
■ 掌握如何減少噪聲,使用中斷服務(wù)例程,以及更多關(guān)于 PID 控制傳遞函數(shù)的信息。
思考一下:
為什么并非所有 PID實(shí)現(xiàn)都令人滿意。