本文圖片來源:ODVA
改進(jìn)工業(yè)電機(jī)的設(shè)計(jì)以及與驅(qū)動(dòng)裝置和其他系統(tǒng)的通信,可幫助工程師在工業(yè)機(jī)器和應(yīng)用方面取得成功。
設(shè)計(jì)和部署電機(jī)驅(qū)動(dòng)系統(tǒng)有助于提高自動(dòng)化效率,并為生產(chǎn)過程的關(guān)鍵部件提供信息。電機(jī)和驅(qū)動(dòng)裝置之間以及其它設(shè)備和系統(tǒng)之間的工業(yè)通信通常采用基于標(biāo)準(zhǔn)的協(xié)議,例如EtherCAT、EtherNet/IP和Profinet等。
三位來自通信協(xié)議組織的專家:PI用戶組織北美執(zhí)行董事 Michael Bowne、EtherCAT技術(shù)集團(tuán)北美代表 Bob Trask 和 ODVA組織分布式運(yùn)動(dòng)和時(shí)間同步 SIG成員Paul Brooks,向我們介紹了工程師如何優(yōu)化電機(jī)驅(qū)動(dòng)系統(tǒng)、改善工業(yè)電機(jī)通信、操作和安全。
01 電機(jī)選擇標(biāo)準(zhǔn)
EtherCAT技術(shù)集團(tuán)北美代表 Bob Trask認(rèn)為,良好的電機(jī)通信有助于驅(qū)動(dòng)器的設(shè)置。首先,需要選擇電機(jī)類型、編碼器以及負(fù)載類型、電流、功率、最大速度、參考速度以及其它關(guān)系。接下來需要考慮的是模式。選擇使用定位模式嗎?是基于位置控制嗎?還是基于速度,基于扭矩的運(yùn)動(dòng)或是基于電流的運(yùn)動(dòng)?是傾向集中式運(yùn)動(dòng)控制還是分布式運(yùn)動(dòng)控制?集中式運(yùn)動(dòng)控制消除了許多復(fù)雜性。
循環(huán)同步速度是一個(gè) CANopen 術(shù)語,我發(fā)現(xiàn)它的應(yīng)用越來越廣泛。用于驅(qū)動(dòng)器和運(yùn)動(dòng)控制的 CiA DS402 設(shè)備配置文件是 EtherCAT使用的一種協(xié)議。CiA DS402 可在每個(gè)循環(huán)中提供更平穩(wěn)的定位。您可以選擇其他值進(jìn)行周期監(jiān)控。
人們對(duì)電機(jī)驅(qū)動(dòng)安全具有巨大并且逐步增長的興趣。集成安全是數(shù)據(jù)的最大消費(fèi)者,正與驅(qū)動(dòng)器進(jìn)行更廣泛的集成。預(yù)測性維護(hù)信息的交流也正在增加,用戶可以嘗試在問題出現(xiàn)之前預(yù)測問題。
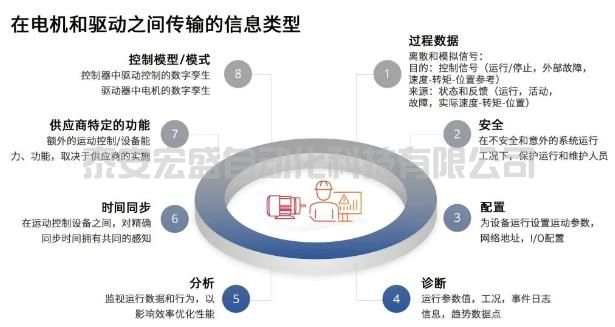
▲圖1:電機(jī)和驅(qū)動(dòng)通信的信息類型包括過程數(shù)據(jù)、安全、配置、診斷、分析、時(shí)間同步、供應(yīng)商專用功能和控制模型/模式。
02 電機(jī)的分析和優(yōu)化
ODVA組織分布式運(yùn)動(dòng)和時(shí)間同步SIG成員Paul Brooks認(rèn)為,運(yùn)動(dòng)控制的基石是在控制器和驅(qū)動(dòng)器之間實(shí)時(shí)交換過程數(shù)據(jù),包括速度模式、位置模式、位置指令、速度指令、扭矩指令,反饋位置、速度扭矩和狀態(tài)信息。
電機(jī)與驅(qū)動(dòng)裝置的組合是一種在物理上移動(dòng)物體的方式。確保運(yùn)行人員的安全不僅僅是停止電機(jī);它還涉及以安全的方式、安全的速度、安全的扭矩等操作電機(jī)和運(yùn)動(dòng)控制系統(tǒng)。配置、診斷和分析是關(guān)鍵??梢垣@得有關(guān)驅(qū)動(dòng)器、電機(jī)及其對(duì)負(fù)載影響的信息。
運(yùn)行人員可以利用這些分析信息,通常是通過人工智能和機(jī)器學(xué)習(xí)來改進(jìn)短期實(shí)時(shí)控制和系統(tǒng)的長期流程優(yōu)化。這包括識(shí)別驅(qū)動(dòng)器-電機(jī)對(duì)的惡化狀況,以及與之相連的機(jī)械負(fù)載的惡化狀況。在數(shù)據(jù)流的增長中,數(shù)據(jù)分析占了大頭。時(shí)間同步是一項(xiàng)關(guān)鍵的網(wǎng)絡(luò)服務(wù),它允許協(xié)調(diào)運(yùn)動(dòng)控制,以確保驅(qū)動(dòng)器和電機(jī)對(duì)時(shí)間有相同的理解。供應(yīng)商或協(xié)議特定的信息是另一個(gè)重要的數(shù)據(jù)集。
ODVA在運(yùn)動(dòng)控制方面提供兩種獨(dú)立的運(yùn)行模式,一種是簡單的I/O數(shù)據(jù)塊,標(biāo)準(zhǔn)化以提供供應(yīng)商之間的互操作性,另一種是簡化的接口,通常從驅(qū)動(dòng)器傳輸速度命令??刂破骱万?qū)動(dòng)器之間有一種更高性能的運(yùn)動(dòng)接口,稱為CIP Motion。該應(yīng)用配置文件提供了一個(gè)分布式模型的協(xié)作視圖,該視圖具有更好的集中模型。
03 優(yōu)化電機(jī)驅(qū)動(dòng)的通信
通常,驅(qū)動(dòng)器有許多參數(shù)需要配置和參數(shù)化?!澳枰獙⒃O(shè)定值從控制器發(fā)送到驅(qū)動(dòng)器。”PI用戶組織北美執(zhí)行董事Michael Bowne說道??刂破骺梢允强删幊踢壿嬁刂破鳎≒LC)或工業(yè)PC,也可以是電機(jī)的專用控制器。
然后驅(qū)動(dòng)器發(fā)回實(shí)際值,如扭矩、電流、速度、位置、設(shè)定斜率和單位以及其它參數(shù)。在Profinet中,這些接口由應(yīng)用類定義。實(shí)際值和設(shè)定值(特別是實(shí)際值),可以從驅(qū)動(dòng)器發(fā)回到中央控制器,或者驅(qū)動(dòng)器可以與驅(qū)動(dòng)器通信。
使用Profinet(基于以太網(wǎng))進(jìn)行集中控制。它可以是簡單對(duì)象,比如過程控制應(yīng)用中的泵或風(fēng)扇,一般會(huì)配置簡單的開環(huán)驅(qū)動(dòng)器。沒有反饋,或者如果有,也是來自編碼器或伺服。不需要時(shí)鐘同步運(yùn)行,因?yàn)檫@是一個(gè)非常簡單的應(yīng)用。循環(huán)周期大約是幾十毫秒。其它應(yīng)用可能需要更復(fù)雜的對(duì)象,例如將位置信息從PLC發(fā)送到驅(qū)動(dòng)器的單軸定位。
伺服或編碼器為從驅(qū)動(dòng)器到控制器的閉環(huán)控制提供反饋。這也不是通過時(shí)鐘同步的,因?yàn)樗菃屋S的,可能并不需要這樣做,但循環(huán)周期大約為1到10毫秒。在高性能領(lǐng)域,利用多路定位時(shí)鐘可以同步多個(gè)軸。
對(duì)于亞毫秒級(jí)的循環(huán)周期是需要反饋的。這就需要交換帶時(shí)間同步的設(shè)定值和實(shí)際值。在某一個(gè)應(yīng)用中有效的功能,在另一個(gè)高性能應(yīng)用中可能并不需要,反之亦然。
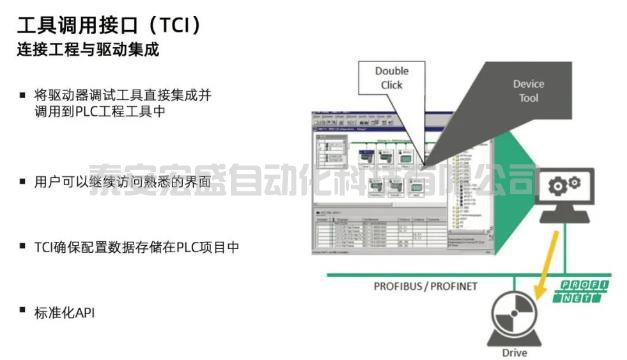
▲圖2:工具調(diào)用接口(TCI)是Profinet的一項(xiàng)功能,與 Profidrive的理念類似,即盡可能使驅(qū)動(dòng)器的設(shè)置更易于運(yùn)行。
04 助力智能制造
在智能制造中,通過模塊化機(jī)器的重復(fù)使用實(shí)現(xiàn)自組織生產(chǎn),一臺(tái)機(jī)器可能具有多種不同的功能,可以放置在生產(chǎn)單元的多個(gè)不同位置。Brooks談道,機(jī)器需要能確定它自己身處何處,以及從哪里獲得所需的配方。所有制造商都在努力實(shí)現(xiàn)輕量化工廠以提高效率和減少用人成本,并更好地保障勞動(dòng)力的安全,尤其是在可用工人減少的情況下。
在增材制造、3D打印等方面的推動(dòng)下,批量生產(chǎn)開始進(jìn)入消費(fèi)包裝行業(yè)。在智能制造中,數(shù)字孿生預(yù)測我們所期望的操作。數(shù)字孿生為工程領(lǐng)域帶來了新的學(xué)科。數(shù)據(jù)科學(xué)家與主題專家合作,將異常工況轉(zhuǎn)化為正常運(yùn)營、更好的報(bào)告、更好的系統(tǒng)監(jiān)控和更好的整體監(jiān)控。遠(yuǎn)程工作人員可以將專業(yè)知識(shí)帶到機(jī)器上,而無需重新部署。
電機(jī)驅(qū)動(dòng)通信接口的發(fā)展,有助于改善生產(chǎn)力、安全性和可持續(xù)性。它有助于更有效地運(yùn)行電機(jī)以降低能源成本,并確定發(fā)生電機(jī)故障的原因。預(yù)測故障可以降低成本,并減少最糟糕的停機(jī)類型——計(jì)劃外停機(jī)的時(shí)間。高級(jí)診斷為維護(hù)人員在干預(yù)系統(tǒng)之前提供更多信息,從而縮短干預(yù)時(shí)間,這有助于提高生產(chǎn)力和運(yùn)營效率??沙掷m(xù)發(fā)展的核心是提高生產(chǎn)效率,從而降低對(duì)環(huán)境的總體制造成本。
05 便捷的驅(qū)動(dòng)配置和分析
Bowne認(rèn)為,智能制造還與易用性有關(guān),讓人們更容易完成任務(wù),騰出時(shí)間進(jìn)行應(yīng)用分析以助力預(yù)測性維護(hù),而不僅僅是優(yōu)化。工具調(diào)用接口(TCI)是Profinet的一項(xiàng)功能,與 Profidrive的理念類似,即盡可能使驅(qū)動(dòng)器的設(shè)置更易于運(yùn)行。工具調(diào)用接口將驅(qū)動(dòng)器供應(yīng)商的調(diào)試工具直接集成到PLC工程中,例如,IBC或控制網(wǎng)絡(luò)的設(shè)備。最終用戶可以在 PLC 設(shè)置中使用熟悉的 PLC 工程工具界面,并訪問供應(yīng)商調(diào)試工具的所有功能。
這使得驅(qū)動(dòng)器更易于設(shè)置,并易于將所有配置數(shù)據(jù)存儲(chǔ)在同一位置(在PLC項(xiàng)目中),避免在調(diào)試工具和PLC項(xiàng)目之間來回奔波。這是通過標(biāo)準(zhǔn)化的應(yīng)用程序接口(API)來處理的。許多具有調(diào)試工具的驅(qū)動(dòng)器供應(yīng)商編寫了與此API相匹配的代碼,以便在PLC項(xiàng)目中使用工具。
信息模型有助于驅(qū)動(dòng)器更快、更輕松地運(yùn)行,尤其是OPC UA配套規(guī)范。OPC UA將類似Profidrive的應(yīng)用配置文件向前推進(jìn)了一步。Profidrive以一種標(biāo)準(zhǔn)化的方式配置所有參數(shù),因此在驅(qū)動(dòng)器、電機(jī)和控制器之間傳送時(shí),它們看起來總是一樣的。一旦工廠運(yùn)行良好,如何節(jié)省準(zhǔn)備和清理數(shù)據(jù)以進(jìn)行分析所需的時(shí)間?
在提供強(qiáng)大的信息模型以使其盡可能簡單方面,OPC UA發(fā)揮著重要作用。隨著IT/OT的不斷融合,用戶希望在邊緣獲得更多驅(qū)動(dòng)數(shù)據(jù)。Profidrive的配套規(guī)范將驅(qū)動(dòng)參數(shù)映射到OPC UA信息模型中。沒有實(shí)現(xiàn)IT/OT融合的小型制造企業(yè),可能需要在同一條線路上使用多個(gè)協(xié)議,或者需要進(jìn)行一些基本分析,在此方面OPC UA可以提供幫助。